Универсальный робот-актер, созданный в Великобритании, выиграл международный конкурс, чтобы стать лицом всемирно известного Космического центра НАСА имени Кеннеди.
Впервые разработанный в 2006 году, компанией
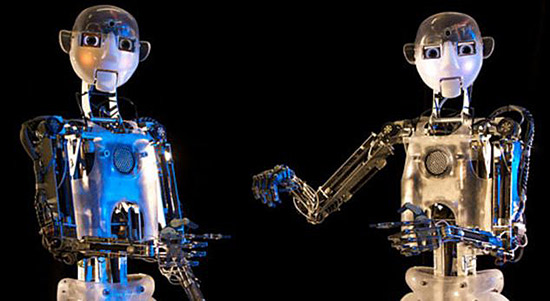
Engineered Arts, высота "Робота актера"/“Robothespian” составляет 1.75 метра, с полной свободой движений верхних частей тела и глаз, поразительно похожих на человеческие.
Теперь космическое агентство NASA решило использовать роботов третьего поколения,
как главных действующих лиц встречающих и приветствующих гостей на футуристической базе мыса Канаверал.